Eureka Collection System
Impossible Metals began work on its engineering architecture in 2020, with first patents filed in 2021. In 2021 we also closed our first funding round, enabling us to begin working on Proof of Concept for our deep sea polymetallic nodule harvesting technology. Our first autonomous underwater vehicle (AUV) called Eureka I successfully completed its Proof of Concept trial by selectively harvesting rocks in an underwater environment in December 2022. Our second generation AUV called Eureka II completed its deep-water test in April of 2024. In 2025 the design of Eureka III Mk1 was completed.
Eureka Collection System Process

Eureka Collection System
Nodule Collection
Impossible Metals using first principles has invented a new architecture for harvesting of polymetallic nodules for the deep ocean. Key, novel features, of the Impossible Metals approach are:
- Environmentally conscious, leveraging selective harvesting by using AI to avoid disturbing detected life on the nodules and by hovering above the seabed to minimize sediment disturbance.
- No single points of failure with an untethered fleet of Eureka III AUVs each with redundant components.
- The elimination of the need for ship-to-ship transfer of nodules, personale, supplies and fuel.
- Scalable, for large-scale operations and designed to handle millions of tons of minerals annually with a fleet of Eureka III AUVs.
- Significantly less cost as a dedicated production support vessel is not required.

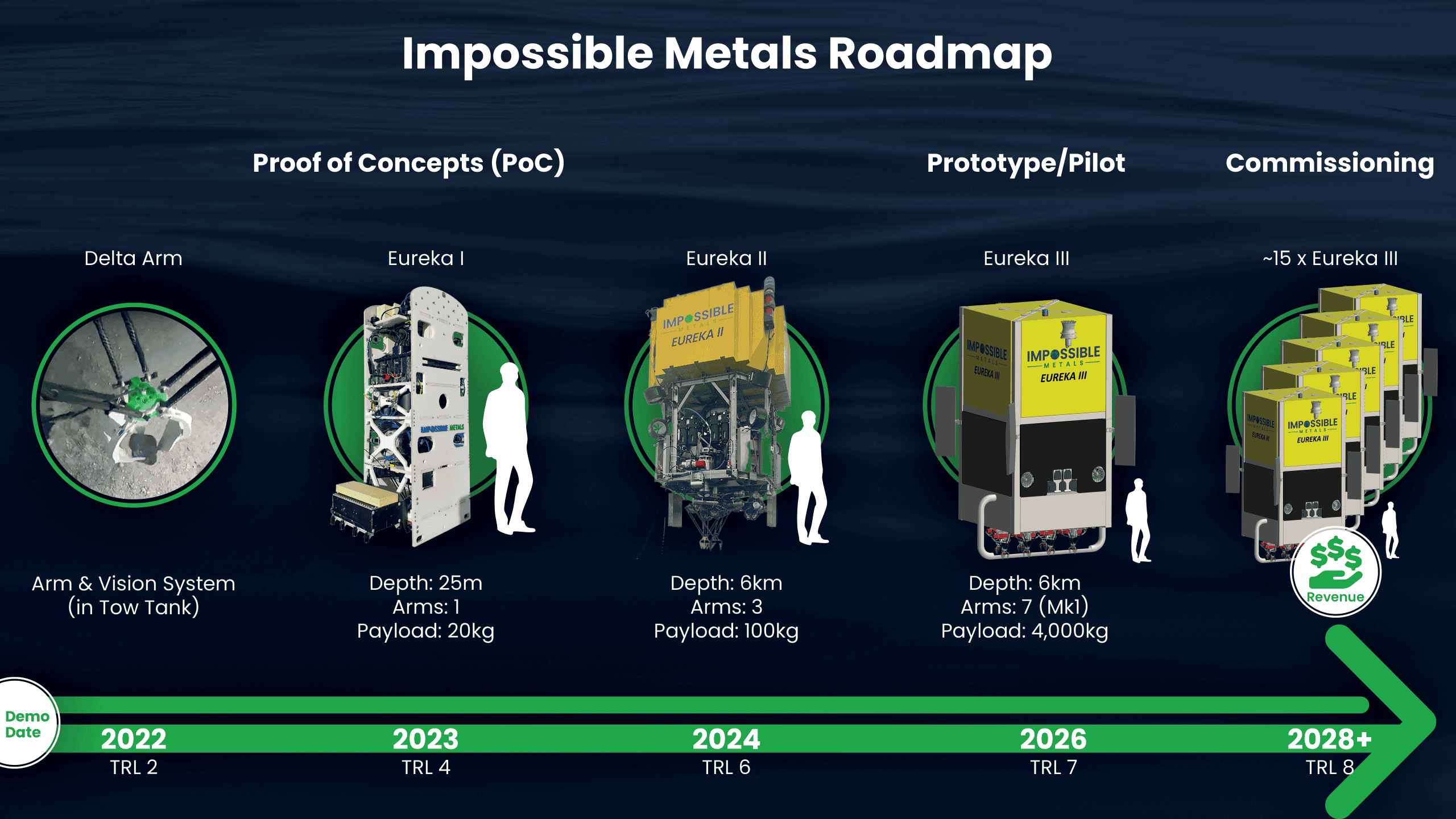
Impossible Metals Technology Roadmap

Eureka II (2024) & Eureka III (2026)

Proprietary Technology (IP)

Smart launch and recovery system (2025)
Smart Hook Capture Demonstration

Eureka II Specifications (2024)
Eureka II Feature Walkthrough (2025)

Eureka II Team (2024)
Eureka II demo in harbor on 13 November 2024

Eureka I Specifications (2023)

Eureka I Team (2023)
Successful shallow water Eureka I demo in harbor on May 2023


The underwater vision system is tested in a tank in the robotics lab (2022)
The custom robotic arm and vision system are tested for fast nodule collection (2022)
