Frequently Asked Questions (FAQs)
Please contact our team if you have any questions that aren’t covered here or would like to discuss your questions or feedback with Impossible Metals.

Impossible Metals Technology
See a video walkthrough of Eureka II here:
Impossible Metals leverages advanced autonomous robotics and AI to conduct selective deep-sea mineral collection with minimal environmental impact. At the core of our system is the Buoyancy Engine, which enables dynamic control of vertical position and achieves true neutral buoyancy. This eliminates the need for downward thrusters that disturb sediment and marine life. The Buoyancy Engine powers the Eureka Collection System, our robotics architecture for low-impact deep-sea operations.
Built on that foundation, the Eureka Collection System is a scalable fleet of autonomous underwater robots designed to collect nodules individually, without direct contact with the seafloor. This system sets a new technical standard for environmentally selective mineral access in the deep ocean.”
A list of deep sea dredging tractors + Eureka II AUV is here.
Our primary technical risks include ensuring the durability and resilience of our robots in harsh underwater conditions, refining our AI algorithms for optimal target identification and resource recovery, and maintaining reliable communication systems between our robots and surface operations. We are actively working on mitigating these risks through rigorous testing, continuous improvement, and strategic partnerships with leading technology providers.
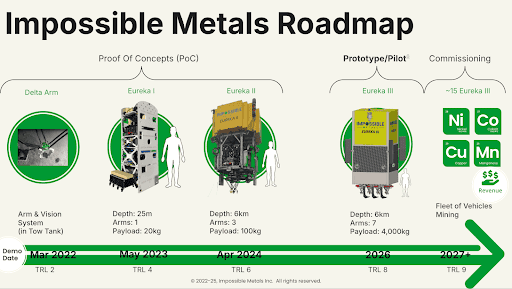
Our technology will be ready for commercial mining operations by 2027. As of mid-2025, we are in the final stages of testing and validation, ensuring our systems meet all performance requirements. We also engage with potential customers to align our development with market needs and expectations. We have also completed the design of Eureka III, the full-size production system.
D.4 has moved to Section I.
Reliability is a cornerstone of our technology development. Our robots are designed with multiple fail-safes, redundancy systems, and real-time monitoring capabilities to ensure consistent performance in various underwater conditions. We conduct extensive testing under simulated and real-world conditions to validate the reliability and durability of our systems.
See also this blog post: Prioritizing Reliability: Reducing the Mean Time Between Failures.
We address the complexity of our technology through a modular design approach, enabling easy maintenance and upgrades. Our interdisciplinary team of experts continuously collaborates to integrate cutting-edge robotics, AI, and marine engineering advancements.
A mission plan is uploaded to each robot before deployment. The robot is fully autonomous and completes the mission plan based on sensors and programming. The robot’s progress is monitored through an acoustic modem (USBL) that tracks the robot’s position and provides low bandwidth status information. The fleet management software on the surface will automatically send essential speed and course adjustment information to the robots in the water to support synchronization of the robotic vehicle launch and recovery. Additionally, the operator on the surface vessel can provide override commands when required.
To allow many robots to operate in parallel, we need to eliminate the need to manage a tether (cable) to each of the robots. Each robot is battery-powered.
D.9 has moved to Section I.
The underwater robot incorporates several standard environmental awareness sensors, such as DVL (Doppler Velocity Log), pressure sensors, USBL (ultra-short baseline), and Stereo Cameras, which are fed into the INS (inertial navigation system), where the information is fused to develop a state estimation for the AUV. As multiple AUVs begin to operate concurrently, a dynamic LBL (Long BaseLine) positioning approach will also be employed.
More information about subsea positioning
The state estimation accuracy for the AUV will be highest at the seafloor, where it is in proximity to other AUVs that have maintained a high accuracy, and near the surface, where it is close to the surface vessel-based USBL. When at the surface, the position will be based almost exclusively on USBL. When at the seafloor, the dynamic LBL combined with DVL and vision tracking of the seafloor will dominate. The stereo cameras on the front of the AUV map out the locations of any nodules and any macro life for the arm control algorithms to determine how to handle them.
As the underwater robot travels through the mission, it adjusts the operating mode from having a desired depth while it travels down through the water, and then, as the acoustic sensors and optical sensors begin to observe the seafloor, the vehicle autonomously transitions to altitude control. Altitude control will be active while collecting nodules. The vertical thrusters adjust the force they exert to maintain the set altitude for the AUV over the seafloor. As nodules are collected, the buoyancy engines on board the AUV pump water out of the tanks to maintain the same small desired downward force from the vertical thrusters.
The seafloor’s typography, where we will collect nodules, gradually changes, and the vehicle travels relatively slowly. A forward-looking sonar provides feedback to the system for topography changes that are too much for the vertical thrusters to manage.
Each underwater robot will be provided with a mission as part of pre-launch communications. Through the ship-based USBL and seafloor dynamic LBL positioning, the robot will move to the desired target starting location. At the start and end of each path, the robot will perform a small visual survey. When arriving at the start of a run, the robot will survey the area briefly to ensure that the positional alignment of the new path is correctly positioned relative to the start or end of the robot from past paths. It will use the distinctive pattern of nodules in the survey as a fingerprint to understand any centimeter-level misalignments that the navigation system is experiencing relative to the navigation system from other robot trips to the same location.
D.13 has moved to Section I.
D.14 has moved to Section I.
Before deployment, the mission is wirelessly uploaded via WiFi to the underwater robot while on deck. During operation, deviations from this initial plan can be uploaded to the robot via the acoustic link. The plan that is initially uploaded and the following deviations are provided by the master software, which is constantly developing updated operational optimization.
D.16 has moved to Section I.
Today, we use a diesel generator to recharge the batteries. In our economic model, we capture the carbon from the diesel generator or pay for carbon offsetting. In the long term, we will look for a renewable power source, such as waves, wind, etc.
The response of the underwater robot depends on the nature of the emergency or failure. Awareness of emergencies and failures external to the individual robot will be communicated acoustically through the USBL, and the updated desired behavior of the robot will react accordingly. For example, suppose the surface vessel becomes unavailable due to incoming weather conditions or an onboard emergency such as a fire. In that case, the communication signal will be sent to the robot to change its course or hold in place until the weather has passed or operations can be resumed in extreme cases with the second ship in the operations.
For small internal failures to the robot, such as loss of connection to certain computers or components, an isolated power reset will occur to re-establish the connection. If the error persists, the mission will abort. Other small failures, for example, could be a break to an arm, and in these cases, the robot is expected to complete the mission and have the damage repaired at the surface.
Each vehicle has a high degree of redundancy, and there are limited single points of failure. An example of a failure that will result in an aborted mission and an emergency ascent is if a leak detection sensor is triggered.
A final active emergency response if the robot is not rising to the surface due to loss of power to achieve this or for any other reason, it will release the load in the hopper; actively attempted if control electronics and power are available or triggered passively using a time delay corrosion fuse that will release the load after approximately 1.5 weeks have passed.
In all cases, a locating beacon on a separate power supply will ping to inform the surface ship of its position if the beacon loses communication with the rest of the vehicle.
See also D.32 How long can the robots remain underwater to deal with weather and emergencies?
While no substantially specialized tools are required for maintaining the underwater robots, while onboard the vessel, it is impossible to travel to the hardware store to pick up what is needed, so a complete set of required tools and redundancies will be available on the vessel.
No, the limitation of our operations is the rate at which the underwater robots are lifted onto the vessels. By increasing the number of vessels concurrently operating, the number of underwater robots doesn’t have limitations.
Many terabytes of storage will be available onboard the underwater robots, providing more data storage capacity than is required. Additionally, redundancy will be in place to protect against corrupted drive failures.
An acoustic link (USBL) transmits basic telemetry and status information between the underwater robots and the surface ship. Due to the low bandwidth of the acoustic link, we are limited in terms of what data is transmitted while the robots are submerged. Once a robot has surfaced as part of its on-deck servicing, the onboard data is transferred off the robot and into the on-ship data center. Data is exchanged between the ship and the cloud-based servers via TCP/IP connection over satellite.
The mission is downloaded to the underwater robot at the start of the mission. We don’t need real-time communication. In an emergency, the robot will go to the surface and use WiFi or satellite communication to communicate with the operating center.
Temperature and salinity at the depths at which we operate are very consistent. This impacts the index of refraction for our optical and acoustic systems, and variation in these values at the depth and through the water column is compensated for during operation.
A common practice for docking autonomous underwater vehicles is securing them below the water’s surface so surface waves do not impact them and changing weather conditions. We are using this approach for the underwater robot’s recovery operations.
Our techno-economic models assume 40 days a year when we are in a ‘weather hold’ condition and cannot operate.
We design for this using pressure vessels to protect the components and, in other cases, oil-compensate when the internal electronics are pressure tolerant but need to be isolated from the seawater. These are both common techniques for design in underwater robots.
From the extensive exploration data, we know that there are very few currents in the deep ocean. We have thrusters and control surfaces for navigating the underwater robot in the water column. Also, in the mission control software, we receive the sensor data in real-time via USBL and update the mission parameters.
At the altitude of 1 meter where we are currently operating, the resolution ranges from 1.25 mm to 0.38 mm on the seafloor, depending on which camera and where in the camera’s field of view is being considered.
The nodule location is a consistent environment with a flat seabed and clear water. The underwater robot does not need to adapt to different environments autonomously. The size and shape of the nodules can vary from one region with nodules to another, and the algorithms for these new environments will need to be adapted. Still, this adaptation takes place at the development level, not in the autonomous behavior of the underwater robot.
The design of the robotic arms, the claw, the arm’s movement, and the claw’s position on the nodule are optimized to minimize local sediment disturbance. Even so, some local sediment disturbance can occur when the nodule is picked. The cameras identify the location of the nodule in front of the vehicle. The nodule’s location is tracked relative to the robot through precise tracking of the vehicle position. Even with the nodule out of sight from the camera, because the robot’s position is precisely tracked, the nodule’s location is understood, enabling the arm to pick it. With the nodule under the vehicle, the arm picks it, and any disturbed sediment is well behind the camera. Additionally, the vehicle will travel primarily into any current that exists. Between the vehicle motion and the surrounding currents, any sediment distributed under the vehicle will remain behind the vehicle.
D.31 has moved to Section I.
The duration that the AUV can remain on the seafloor is dependent on the amount of warning that it has, knowing that it will be remaining at the seafloor when it first enters the water. For example if the AUV has run a full mission and right as it is about to be pulled from the water needs to travel back to the seafloor due to a sudden situation that arises on the surface vessel, the AUV can remain at the seafloor for up to 42 hours before it will surface and communicate its location at the surface via satellite. If we have 4 hours of notice before the surface ship needs to leave the area, such as major weather events, all vehicles in the water will have entered the water knowing that they will be there for an extended period of time and can remain stationed at the seafloor for a total of 4 days.
See also question D.18: How will the underwater robot respond to emergencies or system failures?
