Frequently Asked Questions (FAQs)
Please contact our team if you have any questions that aren’t covered here or would like to discuss your questions or feedback with Impossible Metals.

Techno-Economic Analysis (TEA)
Our latest economic model is v7. Each Eureka IV, our planned production-scale underwater robot, will be able to deliver 12 wet metric tonnes of nodules to the transport ship every 4.4 hours. The same vehicle performs over 5.5 trips per day to deliver an average of 66 metric tons to the transport ship. 100 Eureka IV robots operating in parallel would harvest 6,600 tons per day. No fundamental limit exists on how many underwater robots and transport ships are deployed. We anticipate a volume production per location of around 6.8 million wet tonnes of nodules annually.
The current end effector and internal nodule conveyor can accommodate a wide range of nodule sizes from 2 cm to 11 cm diameter. Refinement to the end effector design and conveyor for the production system will be customized to the nodule distribution in the field of operation. Our current v7 concept economic model assumes targeting the largest nodules in the field picking nodules 6.5 cm diameter and larger.
Our current economic model is v7. In our economics, we model a 25-year effective life for the underwater robots. Underwater vehicles, when maintained, can last well beyond 25 years. The JASON ROV, launched in 1988, is a good example of this. We will spend about 10% of the total CAPEX each year on the maintenance of our equipment.
The main factors that influence underwater robots in general are maintenance management for:
- Corrosion: Low-corrosion materials and sacrificial anodes are used and replaced as needed.
- Biofouling: The ongoing maintenance will include a maintenance schedule for clearing acoustic and optical surfaces to prevent biofouling build-up.
- Moving component wear and tear: The primary cost factor for maintenance is rebuilding components due to wear and tear or in the event of failure, and we’ve incorporated it into the economic model. (Learn more about analysis in this blog post.)
- Electronics failure: In the event of a complete loss of power or control, the robot will always remain positively buoyant and float to the surface.
Since we are operating a large fleet of underwater robots, we can collect performance and required maintenance data on a statistically significant scale and employ maintenance insights based on this information.
See also this blog post: Prioritizing Reliability: Reducing the Mean Time Between Failures.
Eureka III delivers four wet metric tonnes of nodules every 4 hours. Each Eureka IV will deliver 12 metric tons. The breakdown of the mission time for Eureka III is as follows:
- Launch Eureka from the transport vessel to the ocean: 1 minute
- Dive Eureka to the seabed at 4.7km depth: 70 minutes (~1.1 meters per second)
- Harvest nodules to fill Eureka payload: 64 minutes
- Rise Eureka up the 4.7km water column: 70 minutes (~1.1 meters per second)
- Recovery of Eureka from the ocean to the transport vessel using our Smart Launch and Recovery System (SLARS): 4 minutes
- On the vessel: 30 minutes
- Unload the Eureka payload of nodules to the transport vessel
- Swap the Eureka battery for a fully charged new battery pack
- Fill the buoyancy tanks for the next mission
- Eureka vehicle maintenance
- Download of mission data
- Upload of the next mission
Total = 238 minutes or ~4 hours. So in 24 hours, 6 missions can be executed per Eureka III.
Please also see Question I.1 How do you scale to high production rates?
Each Eureka IV robot has approximately 8 arms with a 12-metric-ton payload. The Eureka IV can be reused every 4.4 hours. So, in 24 hours, 5.5 missions can be completed, delivering 5.5 * 12 = 66 metric tonnes per 24 hours. A fleet of 315 Eureka IV robots can deliver 20,790 metric tonnes per 24 hours using 4 vessels, which translates to 6.8 million metric tonnes per year, assuming ~312 production days a year. (Assuming around 53 days a year when a weather hold is in operation.)
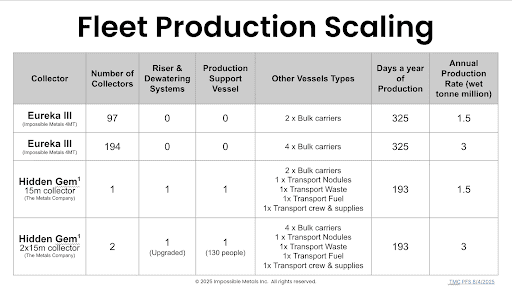
As we do not have any tethers and have a smart launch and recovery system, we can operate in a much wider range of sea states. V7 of our economic model assumes we can operate for 325 days a year.
We expect Impossible Metals’ approach to be the lowest-cost method for deep-sea mining. A fleet of robots has three primary economic benefits compared to dredge and riser-based systems.
The first is the improved economics for a fully operating system. This is achieved through reduced capital expenses (CapEx) by eliminating the need for a dedicated surface production vessel to support equipment such as a riser system. With the Impossible Metals approach, the transport ships pull the robots from the water, collecting the ore without needing ship-to-ship ore transfer.
The second benefit is the ability to scale the system through the incremental addition of CapEx. A small-scale operation can become operational with a relatively modest initial capital investment. As additional capital is invested, the fleet of robots and, thus, the material throughput can be scaled.
The third economic benefit is the lack of single points of failure. While there are increased points of failure with the fleet of robots, there are no single points of failure, ensuring that the selective harvesting architecture remains operational through these failures.
We estimate our costs for a production-scale operation will be about $96 per wet tonne of ore to shore, considering full CAPEX at an 8% weighted average cost of capital.